AI大模型技术的提升在智能驾驶领域引发了深刻变化,它不仅成功融合了多种数据源,还促进了技术框架的创新,从而全方位地重塑了智能驾驶系统的外观。现在,我们依次分析这些变革的具体内容。

多源数据融合成效显著

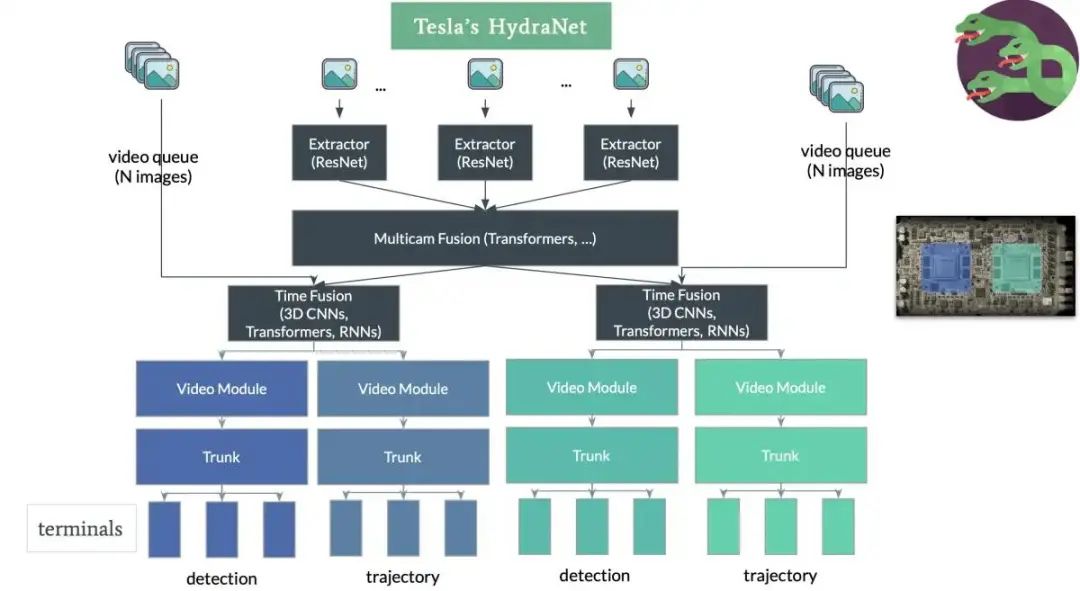
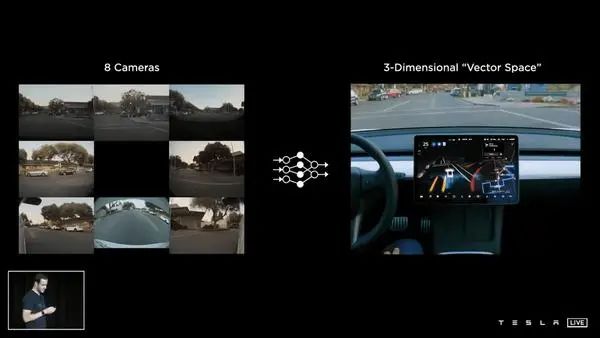
大模型UnifiedBEV集成了摄像头、毫米波雷达和激光雷达等多种数据。比如特斯拉的HydraNet,它能够构建出动态的4D时空场景描述。这样一来,目标检测的准确率就能大幅提升到99.1%。而传统的融合算法,其准确率大约只有94%。这显示出,在真实驾驶情境中,车辆能更准确地辨识四周物体,显著减少了事故的风险。即便是面对城市道路中的种种障碍,它也能作出精确的判断。

多源数据融合技术不仅增强了检测的精确度,还让车辆对周围环境的感知更加全面。借助多种传感器的数据整合,我们能够获取更全面的环境资讯。无论天气状况如何,光照条件怎样,都能保证车辆性能的稳定,这为智能驾驶的可靠性奠定了坚实的根基。
Transformer 架构实现变革

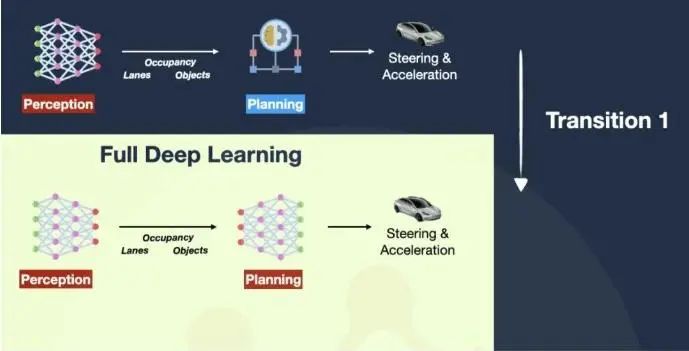
Transformer结构为智能驾驶带来了新的解决途径。特斯拉的FSDV12系统接收传感器原始数据,直接输出转向、加速和制动指令,有效减少了传统模块架构中的累积误差。这一技术革新使得车辆在复杂路口的通行成功率高达92%。比如,在繁忙的十字路口,车辆能更快更精确地做出决策。
这种设计让智能驾驶系统变得更加简便,减少了出错的可能性,提高了系统的反应敏捷度和决策效率。因此,车辆在行驶过程中能更加灵活地适应各种道路状况,进而提升了驾驶体验和行车安全。
世界模型预训练进步明显

LINGO-1在模型预训练方面为世界模型领域带来了重大突破,成功揭示了驾驶环境中物理规律的内在表述,并且能够对交通信号灯的语义实现无样本识别。这一成就使得新城市泛化测试的时间从原来的三个月大幅减少到一周,极大地推动了智能驾驶技术的广泛应用。因此,车辆能够更快地适应新环境。
世界模型预训练提升了车辆的广泛适应性,即便面对未曾遭遇的情况,也能做出相对合理的判断。以陌生城市为例,车辆能如同在熟悉区域一般,精准识别交通标志,从而进一步拓宽了智能驾驶技术的应用范围。
博弈论嵌入模型具创新性
Mobileye使用了纳什均衡求解器,成功提升了行人过街时的预测准确性,达到了89%的高水平。而且,决策响应时间也显著缩短至80毫秒。在行人众多的道路上,这项技术让车辆能更精准地判断行人行为,确保行人和车辆安全行驶,大大减少了事故的发生。
博弈论模型将车辆、行人及其他车辆之间的相互作用纳入考量,提供了更精准的预测工具。它分析了不同参与者策略的选择,使车辆的选择更加智能化和符合人的本性,进而提高了交通的流畅性和安全性。
形式化验证大模型保障安全
英特尔Mobileye开发的概率性时序逻辑验证工具显著提高了自动驾驶系统的安全边界量化准确度,精确度高达99.99%。这一高准确度的量化,为智能驾驶的安全性增添了稳固的保障,降低了安全风险,使乘客在乘坐自动驾驶车辆时感到更加放心。
对大型模型进行形式化验证,需严格分析,运用逻辑和数学工具,对自动驾驶的安全性进行深入检验。这种方法可以预先识别并消除潜在风险,保障智能驾驶系统的稳定运行,从而奠定了坚实的支持基础。
量子机器学习加速破难题
大众与D-Wave携手,采用量子退火技术优化路径规划,大幅提升了复杂环境中的计算效率,速度可提升至千倍。在交通拥堵的地方,这项技术能快速锁定最佳路径,有效缩短出行时长,提升道路通行效率。
量子机器学习技术显著加速了智能驾驶在路径规划方面的进展。该技术基于量子计算的卓越性能,能够在极短时间内处理大量复杂数据,并迅速确定最优方案。因此,汽车在复杂多变的路况中能更高效地行驶。

AI大模型已成为智能驾驶系统设计中的核心组成部分,它极大地革新了相关技术基础。关于AI大模型未来能否为智能驾驶带来更多意想不到的变革,您有何见解?欢迎点赞、转发,并在评论区热烈讨论。